3. Generating gaits#
The next step in developing the robot kinematics is to generate various gaits. First, lets familiarize ourselves with the concept of gaits. Gait is a coordinated sequence of movements of the robot legs and body to achieve smooth locomotion.
The gait cycle of a hexapod robot refers to the sequential movement of its six legs to achieve locomotion. It consists of two main phases for each leg:
Stance Phase – The leg is in contact with the ground, providing support and propulsion as it moves backward relative to the body.
Swing Phase – The leg lifts off the ground, moves forward, and prepares for the next stance phase.
To get an idea of the variance and complexity between gaits, Fig 1. shows four typical gaits. The six legs, right and left hind, middle and front, indicated as RH, RM, RF, LH, LM, and LF, at any one time are either on the ground pushing forward (supporting) shown in white, or in the air moving up to their next position (recovering) shown in black. borrowed from hexapodrobot.weebly.com
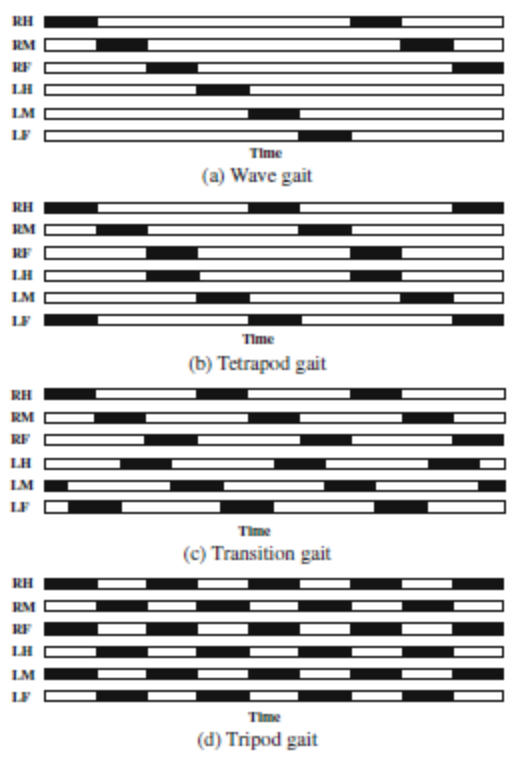
Fig 1. Four typical hexapodal gaits, depicting each of the six legs as either supporting (white) or recovering (black). Image source: (Chen et al. 2012)
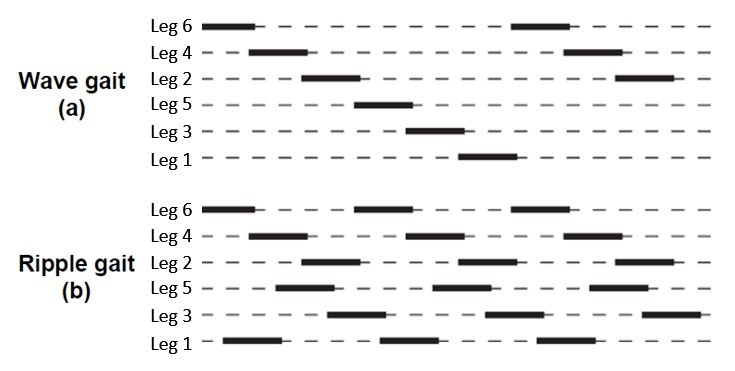
The two most common gaits for hexapods are the tripod gait and the ripple gait. The tripod gait is a simple gait where the robot legs move in two groups of three, lifting one group of three legs at a time. While the ripple gait is a more complex gait where the legs move in a wave-like motion, lifting one leg at a time.
Setting up the Jupyter notebook for experimentation#
This documentation has been generated from a Jupyter notebook and is available in the repo source code (see link below).
The next couple of cells are designated to the setup of the notebook environment. If you are not interested in the experimentation and only want to read the documentation, feel free to skip them.
The first step is to enable live python modules reloading, so changes in the python code of imported files are immediately reflected in the notebook without restarting the kernel.
# Enable python modules live reloading
%load_ext autoreload
%autoreload 2
The next step is configuring matplotlib backend. Widget backend allows to interact with the plots in the notebook and is supported in Google Colab and VSCode.
%config InlineBackend.figure_formats = ['svg']
%matplotlib widget
from IPython.display import display
import matplotlib.pyplot as plt
plt.ioff() # this is equivalent to using inline backend, but figures have to be displayed manually
<contextlib.ExitStack at 0x78f39819a6c0>
Tripod gait#
The tripod gait is a simple gait where the robot legs move in two groups of three:
group A: left-front, right-middle, and left-back
group B: right-front, left-middle, and right-back.
while one group is in stance phase, the other group is in swing phase and cycle repeats.
Lets build the simplest tripod gait generator, it will generate offsets for each leg at a specific phase (0.0 to 1.0).
from gait_generators import GaitGenerator
import matplotlib.pyplot as plt
from models import HexapodLeg
import numpy as np
from point import Point3D
class TripodGaitGenerator(GaitGenerator):
def __init__(
self,
step_length=50, # Length of each step in meters
step_height=40, # Height of leg lift in meters
):
"""
Tripod gait generator for hexapod robot.
Generates leg tip offsets in right-hand coordinate system (x-forward, y-left, z-up).
Parameters:
-----------
step_length: Length of each step in meters
step_height: Height of leg lift in meters
"""
# Store parameters as member fields
self.step_length = step_length
self.step_height = step_height
# Define leg groups for tripod gait
self.tripod_a = [HexapodLeg.left_front, HexapodLeg.right_middle, HexapodLeg.left_back]
self.tripod_b = [HexapodLeg.right_front, HexapodLeg.left_middle, HexapodLeg.right_back]
super().__init__()
def get_offsets_at_phase(self, phase) -> dict[str, Point3D]:
"""
Get offsets for all legs at a specific phase (0.0 to 1.0).
Parameters:
-----------
phase: Float between 0.0 and 1.0 representing the gait cycle progress
Returns:
--------
Dictionary of leg positions with their corresponding offsets
"""
# Generate offsets for each leg group
offsets = {}
# Tripod A legs
a_offset = self._calculate_leg_offset(phase)
for leg in self.tripod_a:
offsets[leg] = a_offset
# Tripod B legs (half cycle offset)
b_offset = self._calculate_leg_offset(phase + 0.5)
for leg in self.tripod_b:
offsets[leg] = b_offset
return offsets
def get_offsets_at_phase_for_leg(self, leg, phase) -> Point3D:
"""
Get offsets for all legs at a specific phase (0.0 to 1.0).
Parameters:
-----------
phase: Float between 0.0 and 1.0 representing the gait cycle progress
Returns:
--------
Offset for the specified leg
"""
# Tripod B legs (half cycle offset)
if leg in self.tripod_b:
phase += 0.5
return self._calculate_leg_offset(phase)
def _calculate_leg_offset(self, phase):
"""Calculate offset for a single leg at phase."""
# Ensure phase is between 0 and 1
phase = phase % 1.0
# Convert phase to angle (0 to 2π)
t = phase * 2 * np.pi
# X movement: forward during swing phase, backward during stance phase
x_offset = -self.step_length / 2 * np.cos(t)
# Z movement: up during swing phase, down during stance phase
z_offset = 0
if np.sin(t) > 0: # Only lift during swing phase
z_offset = self.step_height * np.sin(t)
# Y offset is always zero for straight walking
y_offset = 0
return Point3D([x_offset, y_offset, z_offset])
# Example usage
gait_generator = TripodGaitGenerator()
# Visualize the continuous gait
gait_generator.visualize_continuous(_steps=100)
_ = gait_generator.visualize_continuous_in_3d(_steps=100)


from models import HexapodModel
from plotting import animate_plot, is_sphinx_build, plot_hexapod, update_hexapod_plot
def animate_hexapod_gait(
hexapod: HexapodModel,
gaits_gen: GaitGenerator,
interactive=False,
skip=False,
total_steps=60,
interval=16,
view_elev=47.0,
view_azim=-160,
repeat=1,
feet_trails_frames=0,
):
if skip:
return
if is_sphinx_build():
repeat = 1
leg_centers = {leg.label: leg.tibia_end.copy() for leg in hexapod.legs}
leg_tips = [leg.tibia_end.copy() for leg in hexapod.legs]
def set_pose(step):
step = step % total_steps # handle repeats
phase = step / total_steps # interpolation phase
for leg, leg_tip in zip(hexapod.legs, leg_tips):
offsets = gaits_gen.get_offsets_at_phase_for_leg(leg.label, phase)
leg.move_to(leg_tip + offsets)
fig, ax, plot_data = plot_hexapod(hexapod, feet_trails_frames=feet_trails_frames)
ax.view_init(elev=view_elev, azim=view_azim)
gaits_gen.visualize_continuous_in_3d(
_steps=total_steps, ax=ax, plot_lines=None, leg_centers=leg_centers
)
def update(frame=0):
set_pose(frame)
update_hexapod_plot(hexapod, plot_data)
fig.canvas.draw_idle()
animate_plot(
fig,
update,
_interactive=interactive,
_frames=total_steps * repeat,
_interval=interval,
)
hexapod = HexapodModel()
hexapod.forward_kinematics(0, -25, 110)
generator = TripodGaitGenerator(step_length=120)
anim = animate_hexapod_gait(hexapod, generator, interactive=True, skip=False)
---------------------------------------------------------------------------
RuntimeError Traceback (most recent call last)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/IPython/core/formatters.py:406, in BaseFormatter.__call__(self, obj)
404 method = get_real_method(obj, self.print_method)
405 if method is not None:
--> 406 return method()
407 return None
408 else:
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1385, in Animation._repr_html_(self)
1383 fmt = mpl.rcParams['animation.html']
1384 if fmt == 'html5':
-> 1385 return self.to_html5_video()
1386 elif fmt == 'jshtml':
1387 return self.to_jshtml()
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1302, in Animation.to_html5_video(self, embed_limit)
1299 path = Path(tmpdir, "temp.m4v")
1300 # We create a writer manually so that we can get the
1301 # appropriate size for the tag
-> 1302 Writer = writers[mpl.rcParams['animation.writer']]
1303 writer = Writer(codec='h264',
1304 bitrate=mpl.rcParams['animation.bitrate'],
1305 fps=1000. / self._interval)
1306 self.save(str(path), writer=writer)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:121, in MovieWriterRegistry.__getitem__(self, name)
119 if self.is_available(name):
120 return self._registered[name]
--> 121 raise RuntimeError(f"Requested MovieWriter ({name}) not available")
RuntimeError: Requested MovieWriter (ffmpeg) not available
<matplotlib.animation.FuncAnimation at 0x78f36db06bd0>
This gives a nice forward locomotive gait. However some changes are needed to the generated gait. Right now it starts with legs on the ground, but with maxed out X offsets. To mitigate this we need to introduce a transition stage that will take legs from whatever position they are in to the starting position.
A good starting point for the transition is a 0.25 phase mark where all legs have zero offsets in X axis, however group A is lifted up. In order to start from all the legs on the ground we need to compress Z phase to quarter of the original cycle.
So here is the plan for transition stage:
It runs for 0.25 of the phase
We start with X cycle at 0.25
We start Z cycle 0, but compress first 0.5 of it to 0.25.
At 0.5 both cycles sync up and cycle continues till 1.0
Then we start the full cycle.
Transition out of gait is similar, but starts at 0 and ends at 0.25 or X and Z cycles is compressed to 0.25.
Below is the implementation of the transition. This kind of code works for the animation and is suitable for tripod gait, but with increase of gait complexity and with joystick style controls it would be impossible to implement it this way. We are going to explore a different approach later in this notebook.
def animate_hexapod_gait_with_transitions(
hexapod: HexapodModel,
gaits_gen: GaitGenerator,
interactive=False,
skip=False,
total_steps=60,
interval=16,
view_elev=7.0,
view_azim=-112,
repeat=2,
):
if skip:
return
transition_time_in = 0.75
transition_steps_in = int(total_steps * transition_time_in)
transition_steps_intro = int(total_steps * 0.25)
transition_steps_rest = int(transition_steps_in - transition_steps_intro)
phase_in_x_steps = np.concatenate(
(
np.linspace(0.25, 0.5, transition_steps_intro),
np.linspace(0.5, 1.0, transition_steps_rest),
)
)
phase_in_z_steps = np.concatenate(
(
np.linspace(0.0, 0.5, transition_steps_intro),
np.linspace(0.5, 1.0, transition_steps_rest),
)
)
transition_time_out = 0.25
transition_steps_out = int(total_steps * transition_time_out)
phase_out_x_steps = np.linspace(0.0, 0.25, transition_steps_out + 1)
phase_out_z_steps = np.linspace(0.0, 0.5, transition_steps_out + 1)
transition_steps_end = total_steps * repeat + transition_steps_in
total_frames = total_steps * repeat + transition_steps_in + transition_steps_out
leg_tips = [leg.tibia_end.copy() for leg in hexapod.legs]
def set_pose(step):
if step < transition_steps_in:
phase_x = phase_in_x_steps[step]
phase_z = phase_in_z_steps[step]
offsets = {}
for leg in hexapod.legs:
off = gaits_gen.get_offsets_at_phase_for_leg(leg.label, phase_x)
offsets[leg.label] = Point3D([off.x, 0, 0])
for leg in hexapod.legs:
off = gaits_gen.get_offsets_at_phase_for_leg(leg.label, phase_z)
offsets[leg.label] += Point3D([0, 0, off.z])
for leg, leg_tip in zip(hexapod.legs, leg_tips):
leg.move_to(leg_tip + offsets[leg.label])
elif step < transition_steps_end:
step = step - transition_steps_in
step = step % total_steps # handle repeats
phase = step / total_steps # interpolation phase
for leg, leg_tip in zip(hexapod.legs, leg_tips):
offsets = gaits_gen.get_offsets_at_phase_for_leg(leg.label, phase)
leg.move_to(leg_tip + offsets)
else:
end_step = step - transition_steps_end
phase_x = phase_out_x_steps[end_step]
phase_z = phase_out_z_steps[end_step]
offsets = {}
for leg in hexapod.legs:
off = gaits_gen.get_offsets_at_phase_for_leg(leg.label, phase_x)
offsets[leg.label] = Point3D([off.x, 0, 0])
for leg in hexapod.legs:
off = gaits_gen.get_offsets_at_phase_for_leg(leg.label, phase_z)
offsets[leg.label] += Point3D([0, 0, off.z])
for leg, leg_tip in zip(hexapod.legs, leg_tips):
leg.move_to(leg_tip + offsets[leg.label])
fig, ax, plot_data = plot_hexapod(hexapod)
ax.view_init(elev=view_elev, azim=view_azim)
def update(frame=0):
set_pose(frame)
update_hexapod_plot(hexapod, plot_data)
fig.canvas.draw_idle()
animate_plot(
fig,
update,
_interactive=interactive,
_frames=total_frames,
_interval=interval,
)
hexapod = HexapodModel()
hexapod.forward_kinematics(0, -25, 110)
walk_controller = TripodGaitGenerator(step_length=120)
anim = animate_hexapod_gait_with_transitions(
hexapod, walk_controller, interactive=True, skip=False, view_elev=25
)
---------------------------------------------------------------------------
RuntimeError Traceback (most recent call last)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/IPython/core/formatters.py:406, in BaseFormatter.__call__(self, obj)
404 method = get_real_method(obj, self.print_method)
405 if method is not None:
--> 406 return method()
407 return None
408 else:
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1385, in Animation._repr_html_(self)
1383 fmt = mpl.rcParams['animation.html']
1384 if fmt == 'html5':
-> 1385 return self.to_html5_video()
1386 elif fmt == 'jshtml':
1387 return self.to_jshtml()
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1302, in Animation.to_html5_video(self, embed_limit)
1299 path = Path(tmpdir, "temp.m4v")
1300 # We create a writer manually so that we can get the
1301 # appropriate size for the tag
-> 1302 Writer = writers[mpl.rcParams['animation.writer']]
1303 writer = Writer(codec='h264',
1304 bitrate=mpl.rcParams['animation.bitrate'],
1305 fps=1000. / self._interval)
1306 self.save(str(path), writer=writer)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:121, in MovieWriterRegistry.__getitem__(self, name)
119 if self.is_available(name):
120 return self._registered[name]
--> 121 raise RuntimeError(f"Requested MovieWriter ({name}) not available")
RuntimeError: Requested MovieWriter (ffmpeg) not available
<matplotlib.animation.FuncAnimation at 0x78f36c2f8c20>
This gives a nice forward locomotive gait. However it is forward only and there is no control over the direction of the movement. It is possible to move backwards by reversing the phase interpolation, but it would be nice to be able to control direction using the vector. This way this gait generator can be used with real robot and joystick control.
Directional Gait Decorator#
In order to add direction to the generated gait, we can create a decorator class that will take the generated offsets and apply a rotation to them. This way we can control the direction of the movement.
TL;DR#
We need a 2D rotation matrix that aligns the offsets (originally along the X-axis) with an arbitrary direction vector \([dx, dy]\). The rotation matrix that achieves this is:
Why This Works#
Original offsets are along the X-axis, meaning they can be represented as \([x, 0]\).
A A standard 2D rotation matrix for an angle \(\theta\) is:
The unit direction vector \([dx, dy]\) corresponds to the cosine and sine of some angle, where:
Substituting these into the rotation matrix gives us the desired transformation matrix.
from transforms import Transform
class DirectionalGaitGenerator(GaitGenerator):
"""Gait generator decorator to allow steering in any direction."""
def __init__(self, decorated: GaitGenerator):
super().__init__()
self.decorated = decorated
def get_offsets_at_phase(self, phase, direction=Point3D([1, 0, 0])) -> dict[str, Point3D]:
tf = self.__make_transform(direction)
offsets = self.decorated.get_offsets_at_phase(phase)
return {leg: tf.apply_point(offsets[leg]) for leg in offsets}
def get_offsets_at_phase_for_leg(self, leg, phase, direction=Point3D([1, 0, 0])) -> Point3D:
tf = self.__make_transform(direction)
offsets = self.decorated.get_offsets_at_phase_for_leg(leg, phase)
return tf.apply_point(offsets)
@staticmethod
def __make_transform(direction):
# Normalize direction vector
norm_direction = direction.normalized().numpy()
# Create rotation matrix to align direction with x-axis
# Ignore z-component as robot can't walk up. This also allows to generate steering in place
direction_transform = Transform.from_rotmatrix(
[
[norm_direction[0], -norm_direction[1], 0],
[norm_direction[1], norm_direction[0], 0],
[0, 0, 1],
]
)
return direction_transform
def _legend_for_leg(self, leg) -> str:
return self.decorated._legend_for_leg(leg)
def _line_style_for_leg(self, leg) -> str:
return self.decorated._line_style_for_leg(leg)
# Example usage
directional_tripod_gen = DirectionalGaitGenerator(TripodGaitGenerator(step_length=120))
directional_tripod_gen.visualize_continuous_in_3d(direction=Point3D([1, 0, 0], 'Forward'))
directional_tripod_gen.visualize_continuous_in_3d(direction=Point3D([0, 1, 0], 'Left'))
directional_tripod_gen.visualize_continuous_in_3d(direction=Point3D([1, -1, 0], 'Forward-right'))
# stomp in place
_ = directional_tripod_gen.visualize_continuous_in_3d(direction=Point3D([0, 0, 1], 'UP/Stomp'))




Adding a direction vector did the trick, at least charts look good. Let’s see it on the hexapod.
def animate_hexapod_gait_with_direction(
hexapod: HexapodModel,
gaits_gen: GaitGenerator,
interactive=False,
animate_trajectory=False,
skip=False,
total_steps=60,
interval=16,
view_elev=10.0,
view_azim=-112,
repeat=1,
gait_lines=None,
direction_degrees=0,
animate_direction_degrees=False,
direction_vector_length=100,
trajectory_animation_start=0,
trajectory_animation_end=1,
feet_trails_frames=0,
):
if skip:
return
if is_sphinx_build():
repeat = 1
leg_tips = [leg.tibia_end.copy() for leg in hexapod.legs]
leg_centers = {leg.label: leg.tibia_end.copy() for leg in hexapod.legs}
def set_pose(step, direction):
step = step % total_steps # handle repeats
phase = step / total_steps # interpolation phase
for leg, leg_tip in zip(hexapod.legs, leg_tips):
offsets = gaits_gen.get_offsets_at_phase_for_leg(leg.label, phase, direction=direction)
leg.move_to(leg_tip + offsets)
fig, ax, plot_data = plot_hexapod(hexapod, feet_trails_frames=feet_trails_frames)
ax.view_init(elev=view_elev, azim=view_azim)
dir_plot = ax.plot([0, direction_vector_length], [0, 0], [0, 0], 'y--')
if animate_trajectory:
trajectory_animation_end = 0
_, gait_lines = gaits_gen.visualize_continuous_in_3d(
_steps=total_steps,
ax=ax,
phase_start=trajectory_animation_start,
phase_end=trajectory_animation_end,
plot_lines=None,
leg_centers=leg_centers,
)
def update(frame=0, direction_degrees=direction_degrees):
if animate_direction_degrees:
direction_degrees = (frame / (total_steps * repeat)) * 360
direction = Transform.from_rotvec([0, 0, direction_degrees], degrees=True).apply_point(
Point3D([1, 0, 0])
)
set_pose(frame, direction)
update_hexapod_plot(hexapod, plot_data)
dir_line = direction * direction_vector_length
dir_plot[0].set_data_3d([0, dir_line.x], [0, dir_line.y], [0, dir_line.z])
nonlocal gait_lines
nonlocal trajectory_animation_end
if animate_trajectory:
step = frame % total_steps # handle repeats
trajectory_animation_end = step / total_steps # interpolation phase
_, gait_lines = gaits_gen.visualize_continuous_in_3d(
_steps=total_steps,
ax=ax,
phase_start=trajectory_animation_start,
phase_end=trajectory_animation_end,
plot_lines=gait_lines,
leg_centers=leg_centers,
direction=direction,
)
if interactive:
fig.canvas.draw_idle()
animate_plot(
fig,
update,
_interactive=interactive,
_skip=skip,
_frames=total_steps * repeat,
_interval=interval,
direction_degrees=(-180, 180, 1),
)
hexapod = HexapodModel()
hexapod.forward_kinematics(0, -25, 110)
animate_hexapod_gait_with_direction(
hexapod,
directional_tripod_gen,
skip=True, ######
animate_trajectory=True,
animate_direction_degrees=False,
repeat=1,
)
animate_hexapod_gait_with_direction(
hexapod, directional_tripod_gen, interactive=True, skip=False, animate_trajectory=True
)
---------------------------------------------------------------------------
RuntimeError Traceback (most recent call last)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/IPython/core/formatters.py:406, in BaseFormatter.__call__(self, obj)
404 method = get_real_method(obj, self.print_method)
405 if method is not None:
--> 406 return method()
407 return None
408 else:
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1385, in Animation._repr_html_(self)
1383 fmt = mpl.rcParams['animation.html']
1384 if fmt == 'html5':
-> 1385 return self.to_html5_video()
1386 elif fmt == 'jshtml':
1387 return self.to_jshtml()
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1302, in Animation.to_html5_video(self, embed_limit)
1299 path = Path(tmpdir, "temp.m4v")
1300 # We create a writer manually so that we can get the
1301 # appropriate size for the tag
-> 1302 Writer = writers[mpl.rcParams['animation.writer']]
1303 writer = Writer(codec='h264',
1304 bitrate=mpl.rcParams['animation.bitrate'],
1305 fps=1000. / self._interval)
1306 self.save(str(path), writer=writer)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:121, in MovieWriterRegistry.__getitem__(self, name)
119 if self.is_available(name):
120 return self._registered[name]
--> 121 raise RuntimeError(f"Requested MovieWriter ({name}) not available")
RuntimeError: Requested MovieWriter (ffmpeg) not available
<matplotlib.animation.FuncAnimation at 0x78f360b529c0>
That is a fully functional tripod gait generator with full steering capabilities. Time to move to the ripple gait generator.
Ripple gait#
Ripple gait is a bit more complex as it moves one leg at a time, but it looks more natural and provides more stable movement.
This RippleGaitGenerator implements a classic ripple gait where:
Legs move in a 6-phase sequence
Each leg is 1/6 cycle out of phase with the next leg
The stance phase (on ground) is 2/3 of the cycle
The swing phase (in air) is 1/3 of the cycle
During stance, the leg moves backward linearly
During swing, the leg lifts in a parabolic trajectory while moving forward
class RippleGaitGenerator(GaitGenerator):
def __init__(
self,
step_length=50, # Length of each step in meters
step_height=40, # Height of leg lift in meters
):
"""
Ripple gait generator for hexapod robot.
Generates leg tip offsets in right-hand coordinate system (x-forward, y-left, z-up).
Parameters:
-----------
step_length: Length of each step in meters
step_height: Height of leg lift in meters
"""
# Store parameters as member fields
self.step_length = step_length
self.step_height = step_height
# Define leg groups for ripple gait (6-phase)
self.leg_sequence = [
HexapodLeg.left_back,
HexapodLeg.right_front,
HexapodLeg.left_middle,
HexapodLeg.right_back,
HexapodLeg.left_front,
HexapodLeg.right_middle,
]
super().__init__()
def get_offsets_at_phase(self, phase) -> dict[str, Point3D]:
"""
Get offsets for all legs at a specific phase (0.0 to 1.0).
Parameters:
-----------
phase: Float between 0.0 and 1.0 representing the gait cycle progress
Returns:
--------
Dictionary of leg positions with their corresponding offsets
"""
offsets = {}
for leg in self.all_legs:
offsets[leg] = self.get_offsets_at_phase_for_leg(leg, phase)
return offsets
def get_offsets_at_phase_for_leg(self, leg, phase) -> Point3D:
"""
Get offset for a specific leg at a specific phase (0.0 to 1.0).
Parameters:
-----------
leg: Leg identifier string
phase: Float between 0.0 and 1.0 representing the gait cycle progress
Returns:
--------
Offset for the specified leg
"""
# Get leg's position in sequence (0-5)
leg_index = self.leg_sequence.index(leg)
# Adjust phase for this leg (each leg is 1/6 cycle offset from previous)
leg_phase = (phase + leg_index / 6) % 1.0
return self._calculate_leg_offset(leg_phase)
def _calculate_leg_offset(self, phase):
"""
Calculate the offset for a leg at a specific phase using polynomial functions for smoother motion with proper ease-in/ease-out.
Parameters:
-----------
phase: Float between 0.0 and 1.0
Returns:
--------
Point3D with x, y, z offsets
"""
# Stance phase (on ground) is 2/3 of the cycle
stance_duration = 2 / 3
# Swing phase (in air) is 1/3 of the cycle
swing_duration = 1 / 3
if phase < stance_duration:
# Stance phase - leg on ground moving backward
# Normalize phase to 0-1 range for stance
stance_phase = phase / stance_duration
# Cubic polynomial for smoother ease-in/ease-out during stance
# f(t) = at³ + bt² + ct + d where f(0)=0.5, f(1)=-0.5, f'(0)=0, f'(1)=0
t = stance_phase
x_offset = self.step_length * (0.5 - (3 * t**2 - 2 * t**3))
z_offset = 0 # On ground
else:
# Swing phase - leg in air moving forward
# Normalize phase to 0-1 range for swing
swing_phase = (phase - stance_duration) / swing_duration
# Cubic polynomial for smoother ease-in/ease-out during swing
# f(t) = at³ + bt² + ct + d where f(0)=-0.5, f(1)=0.5, f'(0)=0, f'(1)=0
t = swing_phase
x_offset = self.step_length * (-0.5 + (3 * t**2 - 2 * t**3))
# Modified parabolic trajectory with ease-in and ease-out
# Blend parabolic curve with ease functions at the endpoints
# Base parabolic function (4t(1-t))
parabola = 4 * t * (1 - t)
# Ease-in/ease-out factor (3t² - 2t³) that's 0 at t=0 and 1 at t=1 with smooth derivatives
ease = 3 * t * t - 2 * t * t * t
# Scale the parabola by the ease factor to smooth the endpoints
z_offset = self.step_height * parabola * ease
return Point3D([x_offset, 0, z_offset])
def _calculate_leg_offset_linear_x(self, phase):
"""
Calculate the offset for a leg at a specific phase.
Parameters:
-----------
phase: Float between 0.0 and 1.0
Returns:
--------
Point3D with x, y, z offsets
"""
# Stance phase (on ground) is 2/3 of the cycle
stance_duration = 2 / 3
# Swing phase (in air) is 1/3 of the cycle
swing_duration = 1 / 3
if phase < stance_duration:
# Stance phase - leg on ground moving backward
# Normalize phase to 0-1 range for stance
stance_phase = phase / stance_duration
# Linear movement from front to back
x_offset = self.step_length * (0.5 - stance_phase)
z_offset = 0 # On ground
else:
# Swing phase - leg in air moving forward
# Normalize phase to 0-1 range for swing
swing_phase = (phase - stance_duration) / swing_duration
# Move from back to front
x_offset = self.step_length * (-0.5 + swing_phase)
# Parabolic trajectory for lifting leg
z_offset = self.step_height * 4 * swing_phase * (1 - swing_phase)
return Point3D([x_offset, 0, z_offset])
ripple_gen = RippleGaitGenerator(step_length=120)
ripple_gen.visualize_continuous()
_ = ripple_gen.visualize_continuous_in_3d()

/home/docs/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:908: UserWarning: Animation was deleted without rendering anything. This is most likely not intended. To prevent deletion, assign the Animation to a variable, e.g. `anim`, that exists until you output the Animation using `plt.show()` or `anim.save()`.
warnings.warn(

hexapod = HexapodModel()
hexapod.forward_kinematics(0, -25, 110)
dir_gait_gen = DirectionalGaitGenerator(ripple_gen)
anim = animate_hexapod_gait_with_direction(hexapod, dir_gait_gen, interactive=True, skip=False)
---------------------------------------------------------------------------
RuntimeError Traceback (most recent call last)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/IPython/core/formatters.py:406, in BaseFormatter.__call__(self, obj)
404 method = get_real_method(obj, self.print_method)
405 if method is not None:
--> 406 return method()
407 return None
408 else:
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1385, in Animation._repr_html_(self)
1383 fmt = mpl.rcParams['animation.html']
1384 if fmt == 'html5':
-> 1385 return self.to_html5_video()
1386 elif fmt == 'jshtml':
1387 return self.to_jshtml()
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1302, in Animation.to_html5_video(self, embed_limit)
1299 path = Path(tmpdir, "temp.m4v")
1300 # We create a writer manually so that we can get the
1301 # appropriate size for the tag
-> 1302 Writer = writers[mpl.rcParams['animation.writer']]
1303 writer = Writer(codec='h264',
1304 bitrate=mpl.rcParams['animation.bitrate'],
1305 fps=1000. / self._interval)
1306 self.save(str(path), writer=writer)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:121, in MovieWriterRegistry.__getitem__(self, name)
119 if self.is_available(name):
120 return self._registered[name]
--> 121 raise RuntimeError(f"Requested MovieWriter ({name}) not available")
RuntimeError: Requested MovieWriter (ffmpeg) not available
<matplotlib.animation.FuncAnimation at 0x78f3601c8c20>
Wave Gait#
The WaveGaitGenerator implements a wave gait with these key characteristics:
Only one leg is lifted at a time (maximum stability)
Legs move in a wave-like sequence from back to front
Each leg is 1/6 cycle out of phase with the next leg
The stance phase (on ground) is 5/6 of the cycle
The swing phase (in air) is only 1/6 of the cycle
During stance, the leg moves backward linearly
During swing, the leg lifts in a parabolic trajectory while moving forward
class WaveGaitGenerator(GaitGenerator):
def __init__(
self,
step_length=50, # Length of each step in meters
step_height=40, # Height of leg lift in meters
):
"""
Wave gait generator for hexapod robot.
In wave gait, only one leg is lifted at a time, providing maximum stability.
Legs move in a wave-like sequence from back to front.
Generates leg tip offsets in right-hand coordinate system (x-forward, y-left, z-up).
Parameters:
-----------
step_length: Length of each step in meters
step_height: Height of leg lift in meters
"""
# Store parameters as member fields
self.step_length = step_length
self.step_height = step_height
# Define leg sequence for wave gait (back to front)
self.leg_sequence = [
HexapodLeg.right_back,
HexapodLeg.left_back,
HexapodLeg.right_middle,
HexapodLeg.left_middle,
HexapodLeg.right_front,
HexapodLeg.left_front,
]
super().__init__()
def get_offsets_at_phase(self, phase) -> dict[str, Point3D]:
"""
Get offsets for all legs at a specific phase (0.0 to 1.0).
Parameters:
-----------
phase: Float between 0.0 and 1.0 representing the gait cycle progress
Returns:
--------
Dictionary of leg positions with their corresponding offsets
"""
offsets = {}
for leg in self.all_legs:
offsets[leg] = self.get_offsets_at_phase_for_leg(leg, phase)
return offsets
def get_offsets_at_phase_for_leg(self, leg, phase) -> Point3D:
"""
Get offset for a specific leg at a specific phase (0.0 to 1.0).
Parameters:
-----------
leg: Leg identifier string
phase: Float between 0.0 and 1.0 representing the gait cycle progress
Returns:
--------
Offset for the specified leg
"""
# Get leg's position in sequence (0-5)
leg_index = self.leg_sequence.index(leg)
# Adjust phase for this leg (each leg is 1/6 cycle offset from previous)
leg_phase = (phase + leg_index / 6) % 1.0
return self._calculate_leg_offset_poly_x(leg_phase)
def _calculate_leg_offset_poly_x(self, phase):
"""
Calculate the offset for a leg at a specific phase using polynomial functions for smoother motion with proper ease-in/ease-out.
Parameters:
-----------
phase: Float between 0.0 and 1.0
Returns:
--------
Point3D with x, y, z offsets
"""
# In wave gait, stance phase is 5/6 of the cycle (only 1/6 for swing)
stance_duration = 5 / 6
swing_duration = 1 / 6
if phase < stance_duration:
# Stance phase - leg on ground moving backward
# Normalize phase to 0-1 range for stance
stance_phase = phase / stance_duration
# Cubic polynomial for smoother ease-in/ease-out during stance
# f(t) = at³ + bt² + ct + d where f(0)=0.5, f(1)=-0.5, f'(0)=0, f'(1)=0
t = stance_phase
x_offset = self.step_length * (0.5 - (3 * t**2 - 2 * t**3))
z_offset = 0 # On ground
else:
# Swing phase - leg in air moving forward
# Normalize phase to 0-1 range for swing
swing_phase = (phase - stance_duration) / swing_duration
# Cubic polynomial for smoother ease-in/ease-out during swing
# f(t) = at³ + bt² + ct + d where f(0)=-0.5, f(1)=0.5, f'(0)=0, f'(1)=0
t = swing_phase
x_offset = self.step_length * (-0.5 + (3 * t**2 - 2 * t**3))
# Modified parabolic trajectory with ease-in and ease-out
# Blend parabolic curve with ease functions at the endpoints
# Base parabolic function (4t(1-t))
parabola = 4 * t * (1 - t)
# Ease-in/ease-out factor (3t² - 2t³) that's 0 at t=0 and 1 at t=1 with smooth derivatives
ease = 3 * t * t - 2 * t * t * t
# Scale the parabola by the ease factor to smooth the endpoints
z_offset = self.step_height * parabola * ease
return Point3D([x_offset, 0, z_offset])
def _calculate_leg_offset_linear_x(self, phase):
"""
Calculate the offset for a leg at a specific phase.
Parameters:
-----------
phase: Float between 0.0 and 1.0
Returns:
--------
Point3D with x, y, z offsets
"""
# In wave gait, stance phase is 5/6 of the cycle (only 1/6 for swing)
stance_duration = 5 / 6
swing_duration = 1 / 6
if phase < stance_duration:
# Stance phase - leg on ground moving backward
# Normalize phase to 0-1 range for stance
stance_phase = phase / stance_duration
# Linear movement from front to back
x_offset = self.step_length * (0.5 - stance_phase)
z_offset = 0 # On ground
else:
# Swing phase - leg in air moving forward
# Normalize phase to 0-1 range for swing
swing_phase = (phase - stance_duration) / swing_duration
# Move from back to front
x_offset = self.step_length * (-0.5 + swing_phase)
# Parabolic trajectory for lifting leg
z_offset = self.step_height * 4 * swing_phase * (1 - swing_phase)
return Point3D([x_offset, 0, z_offset])
wave_generator = WaveGaitGenerator(step_length=120, step_height=50)
wave_generator.visualize_continuous(_steps=100)
_ = wave_generator.visualize_continuous_in_3d(_steps=100)


hexapod = HexapodModel()
hexapod.forward_kinematics(0, -25, 110)
directional_wave_gen = DirectionalGaitGenerator(wave_generator)
anim = animate_hexapod_gait_with_direction(
hexapod,
directional_wave_gen,
interactive=False,
skip=True, ######
animate_trajectory=True,
feet_trails_frames=20,
animate_direction_degrees=False,
repeat=1,
)
inter = animate_hexapod_gait_with_direction(
hexapod, directional_wave_gen, interactive=True, skip=False
)
---------------------------------------------------------------------------
RuntimeError Traceback (most recent call last)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/IPython/core/formatters.py:406, in BaseFormatter.__call__(self, obj)
404 method = get_real_method(obj, self.print_method)
405 if method is not None:
--> 406 return method()
407 return None
408 else:
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1385, in Animation._repr_html_(self)
1383 fmt = mpl.rcParams['animation.html']
1384 if fmt == 'html5':
-> 1385 return self.to_html5_video()
1386 elif fmt == 'jshtml':
1387 return self.to_jshtml()
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1302, in Animation.to_html5_video(self, embed_limit)
1299 path = Path(tmpdir, "temp.m4v")
1300 # We create a writer manually so that we can get the
1301 # appropriate size for the tag
-> 1302 Writer = writers[mpl.rcParams['animation.writer']]
1303 writer = Writer(codec='h264',
1304 bitrate=mpl.rcParams['animation.bitrate'],
1305 fps=1000. / self._interval)
1306 self.save(str(path), writer=writer)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:121, in MovieWriterRegistry.__getitem__(self, name)
119 if self.is_available(name):
120 return self._registered[name]
--> 121 raise RuntimeError(f"Requested MovieWriter ({name}) not available")
RuntimeError: Requested MovieWriter (ffmpeg) not available
<matplotlib.animation.FuncAnimation at 0x78f36cd88c20>
Summary and steps forward (pun intended)#
With the current approach we have achieved decent results and it helped us to get a basic understanding of gaits generation, however it has a serious limitations:
It is not possible to transition between gaits as they are implemented as separate classes
There is no transition in and out of the gait from standing position.
Different gaits have different trajectories, however the only thing that has to change is the order in which legs are lifted.
Phase logic is mixed with trajectory logic.
Lets rework the code to address all these issues and have production ready solution we will use in the next notebook that will be taking all we have learned so far to real ROS implementation controlling a simulated robot in Gazebo.
Our new approach should satisfy the following requirements:
Allow defining a gait trajectory.
Allow defining a gait sequence.
Allow defining a gait generator function that will combine the two above given a set of parameters.
Allow steering, turing and transitioning between gaits and positions.
Gait trajectory are fairly straightforward and we have seen some solution using trigonometrical functions and polynomials already. Gait sequencing has been formulated mathematically before, however it can be expressed as phase offsets per leg. Each phase starts with lift and ends with push. By offsetting the leg phase we can define the sequence.
In order to achieve transitioning we need to implement trajectory interpolation. The simplest approach would be to use linear interpolation, however it may create jerkiness cause by sudden trajectory changes causing high deceleration and acceleration. Much better results can be achieved using smoothing spline functions, e.g. a 2nd degree B-spline. B-spline allows a smooth transition between control points while remaining stable if some of the control points are changed, e.g. when new goal point is added. 2nd degree B-spline has continuous first derivative, which means that the velocity is smooth and has no sudden changes in direction.
from smoothing_splines import plot_spline, SplineType
frames_between_points = 30
# x, y, t
trajectory_points = np.array(
[
[0, 0, 0],
[2, 1, frames_between_points * 0.5],
[3, 1, frames_between_points * 0.75],
[5, 2, frames_between_points * 2],
[6, 0, frames_between_points * 5],
[1, 4, frames_between_points * 6],
[2, 5, frames_between_points * 7],
[5, 3, frames_between_points * 7.5],
[3, 3, frames_between_points * 8],
]
)
fig, ax = plt.subplots(2, 1)
fig.set_figheight(10)
ax[0].scatter(trajectory_points[::, 0], trajectory_points[::, 1], c='k', label='Trajectory points')
current_t = trajectory_points[3, 2] + 20
plot_spline(ax[0], current_t, trajectory_points, k=1)
spline_x, spline_y = plot_spline(
ax[0],
current_t,
trajectory_points,
k=3,
derivatives=4,
derivatives_ax=ax[1],
bc_type='natural',
spline_type=SplineType.interp,
color='green',
)
for x, y, t in trajectory_points:
ax[0].text(x, y + 0.2, f'{t=}')
ax[0].text(spline_x(current_t), spline_y(current_t) + 0.2, f'{current_t=}', color='green')
ax[0].legend()
ax[1].legend()
display(fig)
plt.close(fig)

As you can see above, interpolating BSpline generates a smooth trajectory that follows the control points with smooth velocity changes, which will reduce strains on servos. However it comes at a cost of random overshooting that might be non desirable. One of the approaches is to reduce smoothness by mixing in a linear trajectory. Animation below shows how it affects the trajectory.
# Animation size has reached 21028704 bytes, exceeding the limit of 20971520.0. If you're sure you want a larger animation embedded, set the animation.embed_limit rc parameter to a larger value (in MB). This and further frames will be dropped.
plt.rcParams['animation.embed_limit'] = 50
plt.ioff()
fig, ax = plt.subplots(1, 1)
fig.set_figheight(8)
num_items = 4
max_points = 7
def update(frame=0):
ax.clear()
ax.set_xlabel('x')
ax.set_ylabel('y')
ax.set_title('Trajectory smoothing using interpolating B-spline (time points are not uniform)')
ax.set(xlim=(-1, 10), ylim=(-1, 10), aspect='equal')
ax.grid(which='both', color='grey', linewidth=1, linestyle='-', alpha=0.2)
first_point = frame // frames_between_points
last_point = min(first_point + num_items, len(trajectory_points))
control_points = trajectory_points[0 : last_point + 1]
if len(control_points) > max_points:
control_points = control_points[-max_points:]
##############################
ax.scatter(trajectory_points[::, 0], trajectory_points[::, 1], c='k', label='All points')
ax.scatter(control_points[::, 0], control_points[::, 1], c='r', label='Active points')
for x, y, t in trajectory_points:
ax.text(x, y + 0.2, f't={t}')
##############################
# Uncomment to see other splines
# spline_x, spline_y = plot_spline(ax, frame, control_points, 1, color='blue')
# ax.text(spline_x(frame), spline_y(frame) + .2, f'curr_t={frame}', color='blue')
# spline_x, spline_y = plot_spline(ax, frame, control_points, 2, color='orange')
# ax.text(spline_x(frame), spline_y(frame) + .2, f'curr_t={frame}', color='orange')
spline_x, spline_y = plot_spline(
ax, frame, control_points, 3, color='green', bc_type='natural', mix=0.5
)
ax.text(spline_x(frame), spline_y(frame) + 0.2, f'curr_t={frame}', color='green')
ax.legend()
fig.canvas.draw_idle()
frames = len(trajectory_points) - 1
_ = animate_plot(fig, update, frames * frames_between_points, _interval=16, _interactive=False)
---------------------------------------------------------------------------
RuntimeError Traceback (most recent call last)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/IPython/core/formatters.py:406, in BaseFormatter.__call__(self, obj)
404 method = get_real_method(obj, self.print_method)
405 if method is not None:
--> 406 return method()
407 return None
408 else:
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1385, in Animation._repr_html_(self)
1383 fmt = mpl.rcParams['animation.html']
1384 if fmt == 'html5':
-> 1385 return self.to_html5_video()
1386 elif fmt == 'jshtml':
1387 return self.to_jshtml()
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1302, in Animation.to_html5_video(self, embed_limit)
1299 path = Path(tmpdir, "temp.m4v")
1300 # We create a writer manually so that we can get the
1301 # appropriate size for the tag
-> 1302 Writer = writers[mpl.rcParams['animation.writer']]
1303 writer = Writer(codec='h264',
1304 bitrate=mpl.rcParams['animation.bitrate'],
1305 fps=1000. / self._interval)
1306 self.save(str(path), writer=writer)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:121, in MovieWriterRegistry.__getitem__(self, name)
119 if self.is_available(name):
120 return self._registered[name]
--> 121 raise RuntimeError(f"Requested MovieWriter ({name}) not available")
RuntimeError: Requested MovieWriter (ffmpeg) not available
<matplotlib.animation.FuncAnimation at 0x78f35b149d60>
Let’s put it all together and generate some gaits!
%%writefile parametric_gait_generator.py
# Copyright (c) 2017-2025 Anton Matosov
#
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documentation files (the "Software"), to deal
# in the Software without restriction, including without limitation the rights
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
# copies of the Software, and to permit persons to whom the Software is
# furnished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL
# THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
# THE SOFTWARE.
from enum import auto, Enum
from gait_generators import GaitGenerator
from models import HexapodLeg
import numpy as np
from point import Point3D
class GaitType(Enum):
ripple = auto()
wave = auto()
tripod = auto()
class ParametricGaitGenerator(GaitGenerator):
class GaitPhaseParams:
def __init__(
self,
gait_type: GaitType,
leg_phase_offsets: dict[HexapodLeg, float],
swing_duration: float = None,
):
self.gait_type = gait_type
self.leg_phase_offsets = leg_phase_offsets
self.swing_duration = swing_duration
def __init__(self, step_length=1, step_height=1, gait=GaitType.wave):
super().__init__()
self.step_length = step_length
self.step_height = step_height
self.current_gait = gait
self.gaits = {
GaitType.wave: self.GaitPhaseParams(
GaitType.wave,
leg_phase_offsets={
HexapodLeg.right_back: 0,
HexapodLeg.right_middle: 1 / 6,
HexapodLeg.right_front: 2 / 6,
HexapodLeg.left_back: 3 / 6,
HexapodLeg.left_middle: 4 / 6,
HexapodLeg.left_front: 5 / 6,
},
swing_duration=1 / 6,
),
GaitType.ripple: self.GaitPhaseParams(
GaitType.ripple,
leg_phase_offsets={
HexapodLeg.right_back: 0,
HexapodLeg.right_middle: 2 / 6,
HexapodLeg.right_front: 4 / 6,
HexapodLeg.left_back: 3 / 6,
HexapodLeg.left_middle: 5 / 6,
HexapodLeg.left_front: 1 / 6,
},
swing_duration=1 / 3,
),
GaitType.tripod: self.GaitPhaseParams(
GaitType.tripod,
leg_phase_offsets={
HexapodLeg.right_back: 0,
HexapodLeg.right_middle: 1 / 2,
HexapodLeg.right_front: 0,
HexapodLeg.left_back: 1 / 2,
HexapodLeg.left_middle: 0,
HexapodLeg.left_front: 1 / 2,
},
swing_duration=1 / 2,
),
}
def get_offsets_at_phase_for_leg(self, leg, phase) -> Point3D:
gait = self.gaits[self.current_gait]
leg_phase = phase - gait.leg_phase_offsets[leg]
leg_phase %= 1
half_step = self.step_length / 2
if leg_phase < gait.swing_duration:
# Swing phase - leg in air moving forward
t = np.interp(leg_phase, [0, gait.swing_duration], [0, 1])
x_offset = np.interp(leg_phase, [0, gait.swing_duration], [-half_step, half_step])
z_offset = np.sin(t * np.pi) * self.step_height
else:
# Stance phase - leg on ground moving backward
x_offset = np.interp(leg_phase, [gait.swing_duration, 1], [half_step, -half_step])
z_offset = 0 # On ground
return Point3D(
[
x_offset,
0,
z_offset,
]
)
Overwriting parametric_gait_generator.py
import matplotlib.pyplot as plt
from parametric_gait_generator import GaitType, ParametricGaitGenerator
gait_gen = ParametricGaitGenerator()
gait_gen.current_gait = GaitType.wave
axs = gait_gen.visualize_continuous(_steps=500, _subtitle=' Wave gait')
_ = gait_gen.visualize_continuous_in_3d(_steps=100, step_length=gait_gen.step_length)
gait_gen.current_gait = GaitType.ripple
axs = gait_gen.visualize_continuous(_steps=500, _subtitle=' Ripple gait', _num_phases=3)
_ = gait_gen.visualize_continuous_in_3d(_steps=100, step_length=gait_gen.step_length)
gait_gen.current_gait = GaitType.tripod
axs = gait_gen.visualize_continuous(_steps=500, _subtitle=' Tripod gait')
_ = gait_gen.visualize_continuous_in_3d(_steps=100, step_length=gait_gen.step_length)






hexapod = HexapodModel()
hexapod.forward_kinematics(0, -25, 110)
gait_gen.step_length = 80
gait_gen.step_height = 40
gait_gen.current_gait = GaitType.ripple
dir_gait_gen = DirectionalGaitGenerator(gait_gen)
anim = animate_hexapod_gait_with_direction(
hexapod, dir_gait_gen, interactive=True, skip=False, repeat=5
)
---------------------------------------------------------------------------
RuntimeError Traceback (most recent call last)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/IPython/core/formatters.py:406, in BaseFormatter.__call__(self, obj)
404 method = get_real_method(obj, self.print_method)
405 if method is not None:
--> 406 return method()
407 return None
408 else:
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1385, in Animation._repr_html_(self)
1383 fmt = mpl.rcParams['animation.html']
1384 if fmt == 'html5':
-> 1385 return self.to_html5_video()
1386 elif fmt == 'jshtml':
1387 return self.to_jshtml()
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1302, in Animation.to_html5_video(self, embed_limit)
1299 path = Path(tmpdir, "temp.m4v")
1300 # We create a writer manually so that we can get the
1301 # appropriate size for the tag
-> 1302 Writer = writers[mpl.rcParams['animation.writer']]
1303 writer = Writer(codec='h264',
1304 bitrate=mpl.rcParams['animation.bitrate'],
1305 fps=1000. / self._interval)
1306 self.save(str(path), writer=writer)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:121, in MovieWriterRegistry.__getitem__(self, name)
119 if self.is_available(name):
120 return self._registered[name]
--> 121 raise RuntimeError(f"Requested MovieWriter ({name}) not available")
RuntimeError: Requested MovieWriter (ffmpeg) not available
<matplotlib.animation.FuncAnimation at 0x78f358511d60>
Turning robot#
To make robot turn we need to mix in circular movement to the gait. Let’s first make it turn in place. This can be achieved by using existing gait generator and treating X offsets as a rotation angle of the foot around center of the body.
from models import HexapodModel
from plotting import animate_plot, is_sphinx_build
def animate_hexapod_rotation_gait(
hexapod: HexapodModel,
gaits_gen: GaitGenerator,
interactive=False,
skip=False,
total_steps=60,
interval=16,
view_elev=47.0,
view_azim=-160,
repeat=1,
feet_trails_frames=0,
):
if skip:
return
if is_sphinx_build():
repeat = 1
leg_centers = {leg.label: leg.tibia_end.copy() for leg in hexapod.legs}
leg_tips = [leg.tibia_end.copy() for leg in hexapod.legs]
def set_pose(step):
step = step % total_steps # handle repeats
phase = step / total_steps # interpolation phase
for leg, leg_tip in zip(hexapod.legs, leg_tips):
offsets = gaits_gen.get_offsets_at_phase_for_leg(leg.label, phase)
#### <<< NEW CODE START >>>>> #####
rotation_transform = Transform.from_rotvec([0, 0, offsets.x], degrees=True)
leg_tip_target = rotation_transform.apply_point(leg_tip) + Point3D([0, 0, offsets.z])
leg.move_to(leg_tip_target)
#### <<< NEW CODE END >>>>> #####
fig, ax, plot_data = plot_hexapod(hexapod, feet_trails_frames=feet_trails_frames)
ax.view_init(elev=view_elev, azim=view_azim)
gaits_gen.visualize_continuous_in_3d(
_steps=total_steps, ax=ax, plot_lines=None, leg_centers=leg_centers, rotation_gaits=True
)
def animate(frame=0):
set_pose(frame)
update_hexapod_plot(hexapod, plot_data)
fig.canvas.draw_idle()
animate_plot(
fig,
animate,
_interactive=interactive,
_frames=total_steps * repeat,
_interval=interval,
)
hexapod = HexapodModel()
hexapod.forward_kinematics(0, -25, 110)
rotation_direction = 45 # exaggerated to see the effect
rotation_gen = ParametricGaitGenerator(step_length=rotation_direction, step_height=60)
# rotation_gen.current_gait = GaitType.tripod
# rotation_gen.current_gait = GaitType.ripple
rotation_gen.current_gait = GaitType.wave
anim = animate_hexapod_rotation_gait(hexapod, rotation_gen, interactive=False, skip=False)
---------------------------------------------------------------------------
RuntimeError Traceback (most recent call last)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/IPython/core/formatters.py:406, in BaseFormatter.__call__(self, obj)
404 method = get_real_method(obj, self.print_method)
405 if method is not None:
--> 406 return method()
407 return None
408 else:
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1385, in Animation._repr_html_(self)
1383 fmt = mpl.rcParams['animation.html']
1384 if fmt == 'html5':
-> 1385 return self.to_html5_video()
1386 elif fmt == 'jshtml':
1387 return self.to_jshtml()
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1302, in Animation.to_html5_video(self, embed_limit)
1299 path = Path(tmpdir, "temp.m4v")
1300 # We create a writer manually so that we can get the
1301 # appropriate size for the tag
-> 1302 Writer = writers[mpl.rcParams['animation.writer']]
1303 writer = Writer(codec='h264',
1304 bitrate=mpl.rcParams['animation.bitrate'],
1305 fps=1000. / self._interval)
1306 self.save(str(path), writer=writer)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:121, in MovieWriterRegistry.__getitem__(self, name)
119 if self.is_available(name):
120 return self._registered[name]
--> 121 raise RuntimeError(f"Requested MovieWriter ({name}) not available")
RuntimeError: Requested MovieWriter (ffmpeg) not available
<matplotlib.animation.FuncAnimation at 0x78f35751f1d0>
Putting it all together#
Now that we have all the pieces in place, we can put them together to create a full walk controller. The controller will take care of the following:
Process input command of the walk direction and rotation
Generate a walk trajectory based on the input direction
Generate a turn trajectory based on the input rotation
Combine the two trajectories into a single walk trajectory
Apply the walk trajectory to the robot based on the current robot legs position
%%writefile walk_controller.py
# Copyright (c) 2017-2025 Anton Matosov
#
# Permission is hereby granted, free of charge, to any person obtaining a copy
# of this software and associated documentation files (the "Software"), to deal
# in the Software without restriction, including without limitation the rights
# to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
# copies of the Software, and to permit persons to whom the Software is
# furnished to do so, subject to the following conditions:
#
# The above copyright notice and this permission notice shall be included in
# all copies or substantial portions of the Software.
#
# THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
# IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
# FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL
# THE AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
# LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
# OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
# THE SOFTWARE.
import numpy as np
from parametric_gait_generator import GaitType, ParametricGaitGenerator
from point import Point3D
from transforms import Transform
class WalkController:
def __init__(
self,
hexapod,
step_length=60,
step_height=40,
rotation_speed_degrees=10,
phase_steps_per_cycle=30,
gait=GaitType.wave,
):
self.hexapod = hexapod
self.step_length = step_length
self.step_height = step_height
self.rotation_speed_degrees = rotation_speed_degrees
self.gait_gen = ParametricGaitGenerator(step_length=1.0, step_height=1.0, gait=gait)
self.current_phase = 0.0
self.last_stop_phase = 0.0
self.phase_step = 1 / phase_steps_per_cycle
self.leg_tips_on_ground = [(leg, leg.tibia_end.copy()) for leg in hexapod.legs]
self.current_direction = Point3D([1, 0, 0])
self.current_stride_ratio = 0
self.current_rotation_ratio = 0
@property
def current_gait(self):
return self.gait_gen.current_gait
@current_gait.setter
def current_gait(self, gait):
self.gait_gen.current_gait = gait
def next(
self,
stride_direction=Point3D([1, 0, 0]),
stride_ratio=1.0,
rotation_ratio=0.0,
phase_override=None,
verbose=False,
):
self.__next_phase(phase_override)
feet_targets = self.__next_feet_targets(
stride_direction, stride_ratio, rotation_ratio, verbose
)
self.__move_feet(feet_targets)
def __next_phase(self, phase_override=None):
if phase_override is not None:
self.current_phase = phase_override
else:
self.current_phase += self.phase_step
def __next_feet_targets(self, stride_direction, stride_ratio, rotation_ratio, verbose):
###############################################################
## All if this mixing, smoothing and clipping is a hot garbage,
# TODO(anton-matosov) switch to proper trajectory mixing
stride_ratio = np.clip(stride_ratio, 0, 1)
rotation_ratio = np.clip(rotation_ratio, -1, 1)
no_motion_eps = 0.05
had_stride = abs(self.current_stride_ratio) > no_motion_eps
had_rotation = abs(self.current_rotation_ratio) > no_motion_eps
self.current_stride_ratio = np.interp(
0.3, [0, 1], [self.current_stride_ratio, stride_ratio]
)
self.current_rotation_ratio = np.interp(
0.3, [0, 1], [self.current_rotation_ratio, rotation_ratio]
)
self.current_direction = self.current_direction.interpolate(stride_direction, 0.3)
self.current_stride_ratio = np.clip(self.current_stride_ratio, 0, 1)
self.current_rotation_ratio = np.clip(self.current_rotation_ratio, -1, 1)
has_stride = abs(self.current_stride_ratio) > no_motion_eps
has_rotation = abs(self.current_rotation_ratio) > no_motion_eps
had_motion = had_stride or had_rotation
has_motion = has_stride or has_rotation
stopping = had_motion and not has_motion
starting = not had_motion and has_motion
stopped = not had_motion and not has_motion
if starting or stopped:
self.current_phase = 0
height_ratio = 1
if stopping:
self.last_stop_phase = self.current_phase
else:
self.last_stop_phase = 0.0
###############################################################
result = []
direction_transform = self.__make_direction_transform(self.current_direction)
for leg, leg_tip in self.leg_tips_on_ground:
foot_target = leg_tip
gait_offsets = self.gait_gen.get_offsets_at_phase_for_leg(leg.label, self.current_phase)
# Apply steering
if has_stride:
stride_offsets = gait_offsets * Point3D(
[self.step_length * self.current_stride_ratio, 0, 0]
)
direction_offsets = direction_transform.apply_point(stride_offsets)
foot_target = foot_target + direction_offsets
# Apply rotation
if has_rotation:
rotation_degrees = (
self.rotation_speed_degrees * self.current_rotation_ratio * gait_offsets.x
)
rotation_transform = Transform.from_rotvec([0, 0, rotation_degrees], degrees=True)
foot_target = rotation_transform.apply_point(foot_target)
if has_stride or has_rotation:
foot_target.z += gait_offsets.z * self.step_height * height_ratio
if verbose:
print(f'{leg.label} {self.current_phase=}')
print(f'{leg.tibia_end=}')
print(f'{gait_offsets=}')
print(f'{stride_offsets=}')
print(f'{direction_offsets=}')
print(f'{foot_target=}')
print()
result.append((leg, foot_target))
return result
@staticmethod
def __make_direction_transform(direction):
# Normalize direction vector
norm_direction = direction.normalized().numpy()
# Create rotation matrix to align direction with x-axis
# Ignore z-component as robot can't walk up. This also allows to generate stepping in place
direction_transform = Transform.from_rotmatrix(
[
[norm_direction[0], -norm_direction[1], 0],
[norm_direction[1], norm_direction[0], 0],
[0, 0, 1],
]
)
return direction_transform
def __move_feet(self, legs_and_targets):
for leg, foot_target in legs_and_targets:
leg.move_to(foot_target)
Overwriting walk_controller.py
import importlib
from models import HexapodModel
from plotting import animate_plot, is_sphinx_build
import walk_controller
importlib.reload(walk_controller) # autoreload fails with files written by notebook for some reason
def animate_hexapod_walk(
walk_controller: walk_controller.WalkController,
interactive=False,
skip=False,
fps=30,
view_elev=47.0,
view_azim=-160,
repeat=1,
feet_trails_frames=0,
):
if skip:
return
if interactive:
repeat = 100
if is_sphinx_build():
repeat = 1
fig, ax, plot_data = plot_hexapod(
walk_controller.hexapod, feet_trails_frames=feet_trails_frames
)
ax.view_init(elev=view_elev, azim=view_azim)
total_frames = fps * repeat
last_frame = 0
def animate(
frame=0,
direction_degrees=0,
walk_speed=1,
rotation_ratio=0,
):
nonlocal last_frame
if interactive and frame == last_frame:
# other params are changing, don't update walker
return
phase = frame % fps
phase = phase / fps
if not interactive:
walk_speed = np.interp(
frame, [0, total_frames * 0.25, total_frames * 0.75, total_frames], [0, 1, 1, 0]
)
stride_direction = Point3D([1, 0, 0])
stride_direction = Transform.from_rotvec(
[0, 0, direction_degrees], degrees=True
).apply_point(stride_direction)
walk_controller.next(
phase_override=phase,
stride_direction=stride_direction,
stride_ratio=walk_speed,
rotation_ratio=rotation_ratio,
verbose=False,
)
update_hexapod_plot(hexapod, plot_data)
fig.canvas.draw_idle()
last_frame = frame
animate_plot(
fig,
animate,
_interactive=interactive,
_frames=total_frames,
_interval=1000 / fps,
walk_speed=(0, 2, 0.1),
direction_degrees=(-180, 180, 1),
rotation_ratio=(-2, 2, 0.1),
)
hexapod = HexapodModel()
hexapod.forward_kinematics(0, -25, 110)
walker = walk_controller.WalkController(
hexapod, step_length=120, step_height=60, rotation_speed_degrees=10, gait=GaitType.ripple
)
anim = animate_hexapod_walk(
walker,
interactive=True,
skip=False,
feet_trails_frames=40,
repeat=5,
view_elev=70,
view_azim=180,
fps=30,
)
---------------------------------------------------------------------------
RuntimeError Traceback (most recent call last)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/IPython/core/formatters.py:406, in BaseFormatter.__call__(self, obj)
404 method = get_real_method(obj, self.print_method)
405 if method is not None:
--> 406 return method()
407 return None
408 else:
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1385, in Animation._repr_html_(self)
1383 fmt = mpl.rcParams['animation.html']
1384 if fmt == 'html5':
-> 1385 return self.to_html5_video()
1386 elif fmt == 'jshtml':
1387 return self.to_jshtml()
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:1302, in Animation.to_html5_video(self, embed_limit)
1299 path = Path(tmpdir, "temp.m4v")
1300 # We create a writer manually so that we can get the
1301 # appropriate size for the tag
-> 1302 Writer = writers[mpl.rcParams['animation.writer']]
1303 writer = Writer(codec='h264',
1304 bitrate=mpl.rcParams['animation.bitrate'],
1305 fps=1000. / self._interval)
1306 self.save(str(path), writer=writer)
File ~/checkouts/readthedocs.org/user_builds/drqp/envs/stable/lib/python3.12/site-packages/matplotlib/animation.py:121, in MovieWriterRegistry.__getitem__(self, name)
119 if self.is_available(name):
120 return self._registered[name]
--> 121 raise RuntimeError(f"Requested MovieWriter ({name}) not available")
RuntimeError: Requested MovieWriter (ffmpeg) not available
<matplotlib.animation.FuncAnimation at 0x78f3573cf5c0>